The 2020a flight will be tagging along with Mark Conner with NSTAR. Project: Traveler will be attaching a small payload to the bottom of Mark's flight string, and therefore no flight dynamics will be listed. The camera design is a variation on the Raspberry Pi cameras flown several years ago.
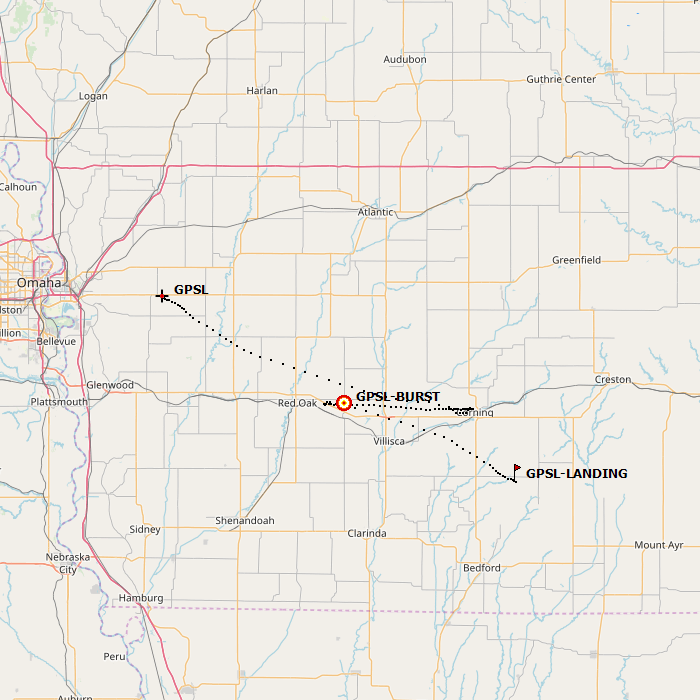
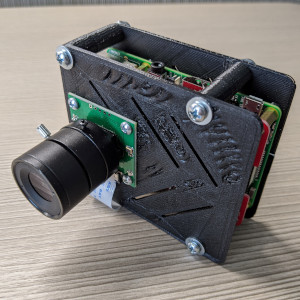
The camera uses a cheap Arducam 5MP sensor with a CS camera mount, and the lens is a 4mm fixed-focus lens. The total investment for the imagery is about $30 plus the Pi. To aide with the Pi, a real time clock was added to the I2C lines so that the time stamp is current on the Raspberry Pi generated photos despite not having an internet connection available at the launch site. I also added a piezo buzzer to the Pi so that it could provide some level of reassurance that it was booted and operating normally prior to launch.
To contain all of the Pi camera, I used a 3D printed enclosure made from PETG filament.
Table of Contents
Flight Parameters
| Launch Date/Time |
Saturday July 11, 2020 at 9:00am (14:00Z) |
|
| Alternative Date | n/a | |
| Launch Site | Treynor, IA (41.23N, -95.60W) | |
|
Capsule 1 (Track) 144.39MHz |
Tracker: ptFlex with DRA818V 500mW transmitter signing W0ZC-11. Sensor: Beaconing: Delay
Camera: Raspberry Pi camera and controller. |
0.7kg |
|
|
Flight Results
| Launch Date/Time | Saturday July 11, 2020 at 9:03am (14:03Z) |
| Launch Site | Treynor, IA (41.23N, -95.60W) |
| Burst Altitude | 30,422m (99,810') |
| Average Ascent Rate | 4.35m/s (856'/min) |
| Measured Descent Rate | 5.96m/s (1,173'/min) |
| Touchdown Site | 40.73N, -94.67W |
| Touchdown Time | Saturday July 11, 2020 at 11:16am (16:15Z) |
| Recovery Time | Saturday July 11, 2020 at 12:13pm (17:13Z) |
| Distance Traveled | 97.5km (60.5mi) |
| Total Flight Time | 2:24 |
| Downloads | Flight Path (KML), Analysis Spreadsheet, Winds Aloft Forecast, W0ZC-11 Log |
The ptFlex tracking system worked flawlessly throughout the flight. I did include a modification to the firmware to track the current memory consumption to look for anomalies or memory leaks, however none were detected.
The new camera module with the Raspberry Pi worked quite well throughout the flight. I was impressed with the overall quality of the photos as compared with the older Canon 130IS camera I have been using. A lot of good data was accumulated with the camera by modifying the camera capture settings and taking a lot of photos.
The biggest problem with the camera is that the chromatic lens aberrations were quite noticeable as the flight ascended. The center of the photo frame had a lot of color saturation, and then it dropped off rapidly as the photo extended beyond the middle. I'm currently searching for an effective correction mechanism, but it would appear that the data is available and the photos can be largely salvaged.
The PETG-printed inclosure survived the flight, despite sitting in the hot summer sun for an hour after landing.
We did narrowly avoid a catestrophic failure by shear luck. The split-ring's that I've been using on my payloads for a decade now nearly failed between mark's capsules and my capsule that was on bottom. This particualr piece of load-line that I grabbed for this flight had unusually small split-rings on it. The flight was apparently quite turbulent and the split-ring separated to the point that upon recovery, I was able to pull the capsule free with a light tug.
Photo Highlights




















































































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
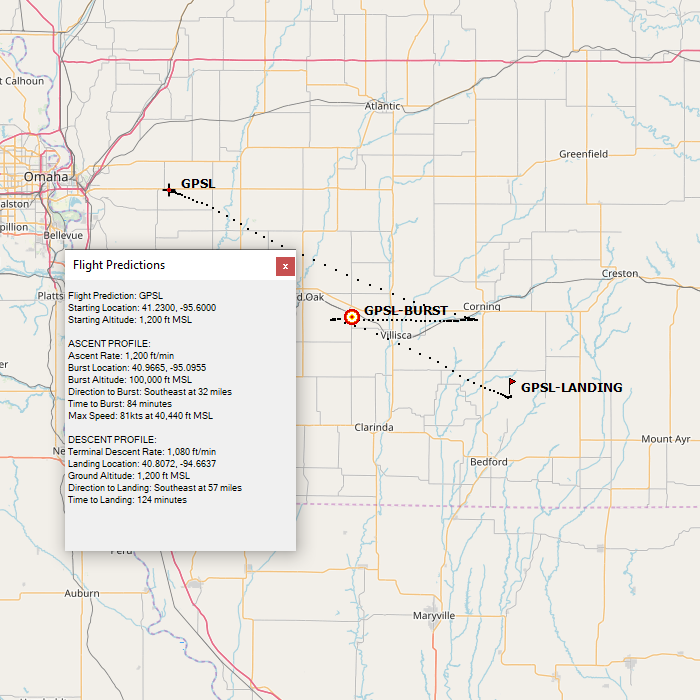
Tracking Predictions
11 July 2020
10 July 2020